“Rover”
“Rover” is long term personal learning project, in it’s current iteration it is a mostly 3D printed 4 wheeled robot. Rover is a platform that I use to improve my 3D CAD modelling, electrical and mechanical building skills. It is also a fantastic way of furthering my electronics design and fabrication skills. There are no predetermined goals for this project, it evolves and grows with my interests.
As of winter 2020, Rover is equipped with a 4 wheel independent drive capable of a top speed of about 2.5 m/s. Sensing is handled by a salvaged spinning LIDAR unit and a front facing primesense depth camera. Onboard processing is handled by a Nvidia Jetson Nano and a Raspberry Pi 4. SLAM based navigation is already operational and higher level autonomous navigation and task handling are next on the Todo list.


Cross-section of one of the hub motor/wheel assembly. The motor is embedded inside the wheel and supports the wheel using custom 3D printed bearings

Rover is equipped with a spinning line LIDAR unit that can generate accurate range finding data around the robot. Additionally Rover has a forward facing RGBD camera, together these sensors are used for SLAM navigation and AI inference.

Rover's base frame is constructed using 15x15mm aluminum extrusions. These provide a sturdy and easy way to mount the 3D printed pieces to the frame. The frame is supported by the 3D printed pieces in various places to stiffen the chassis.

The Logic Card houses the Jetson Nano and Raspberry Pi 4 boards. The Raspberry Pi handles all the peripheral interfaces for Rover, while the Jetson nano is responsible for higher level logic like AI inference and SLAM navigation. The boards are networked together over ethernet.

The Power card contains the high power components of Rover. It houses the high current motor controllers as well as Voltage converters for the rest of the robot's systems. It is fed directly by the battery modules via a fuse panel.

Dual Battery modules house the LiPo batteries that power Rover. Each module contains 2 5000mAh LiPo batteries that are tied together in parallel. Each cell within the battery can be individually monitored by the Logic system. The Battery modules are mounted using a slide mechanism and can be hot swapped.
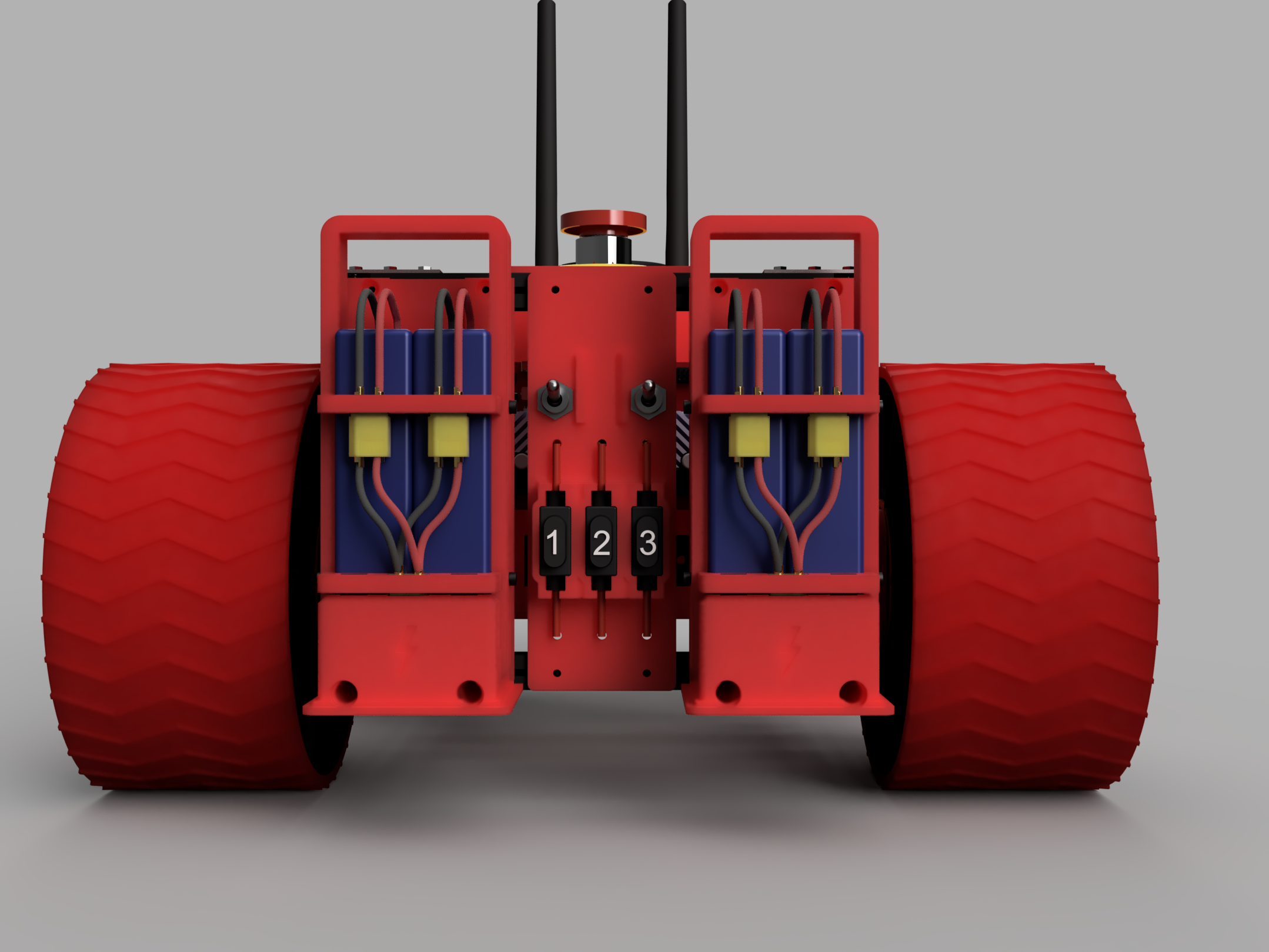
A fuse and switch panel at the rear protects against accidental shorts and provides an easy way to arm the high current drives and logic cards. An emergency stop button up top lets you easily disarm all the high current drives and brake the motors if (when) the code malfunctions.